
Systems Engineer & Agentic AI Architect
Orchestrating intelligent systems and agentic workflows.
About Me
Motivation
I am driven by the potential of Africa's R&D ecosystem. By merging rigorous scientific experimentation with agentic AI orchestration, I aim to build systems that aren't just automated, but truly intelligent and adaptive.
Backstory
From leading Kenya's first liquid rocket engine research to becoming a CKAD-certified specialist, my path has been defined by a deep focus on complex systems engineering and distributed machine learning infrastructure.
Why I'm Perfect For The Job
I bring a multi-disciplinary engineer's discipline to any system's design and integration. I specialize in the 'deceptively simple' intersection of physical hardware, distributed services, and agentic workflows, ensuring robust and reproducible results.
Projects
Agentic AI & ML Orchestration
Developed reproducible ML/RL pipelines as a Freelance agent. Focused on cloud deployment, model quantization, and agentic robustness using Docker and Kubernetes.
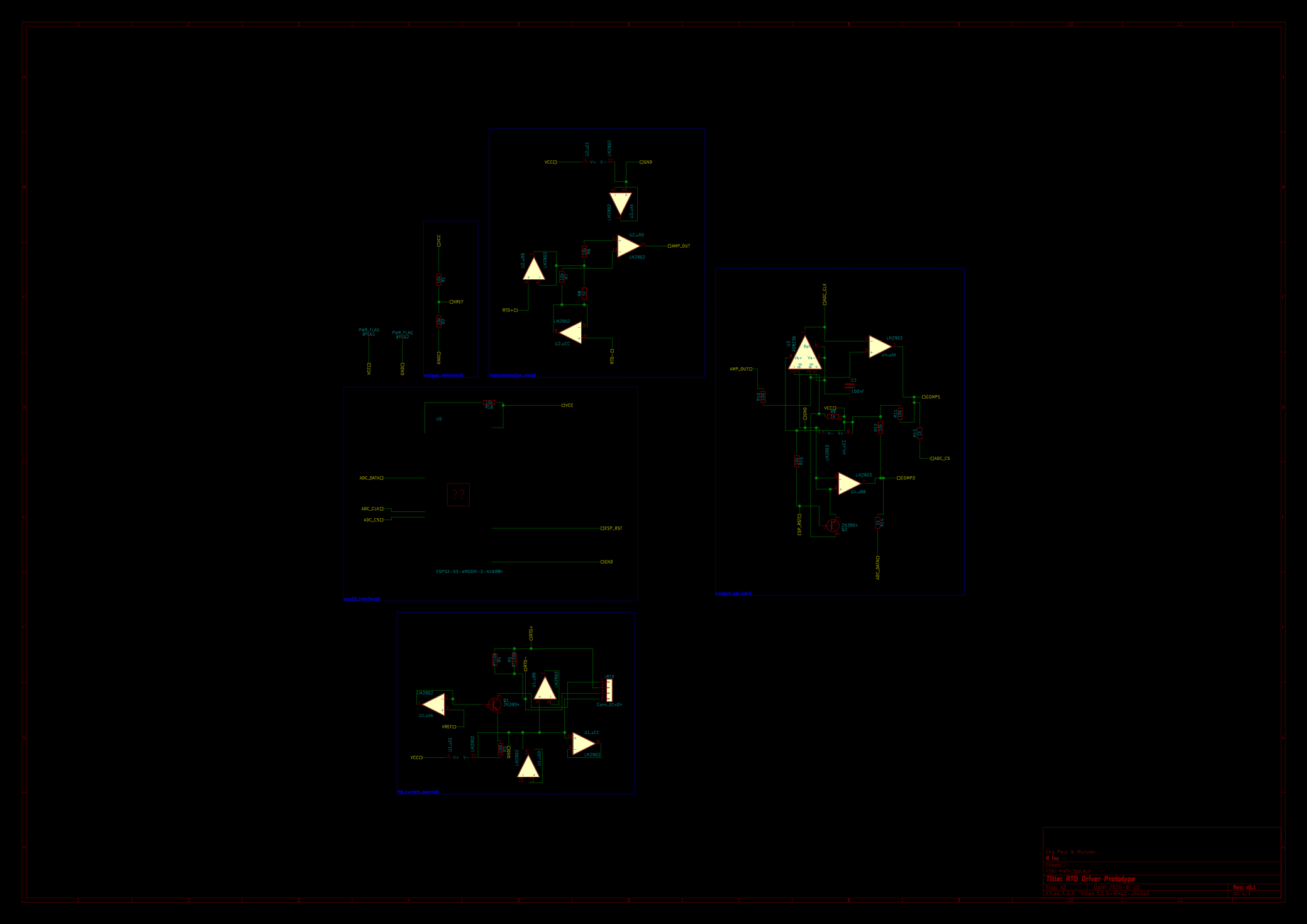
PCB Generation AI Agent
Architected an AI-driven design agent that translates natural language circuit descriptions into validated KiCad schematics. Orchestrated via a serverless multi-agent pipeline, bridging the gap between hardware architecture and generative AI.
Liquid Rocket Propulsion Systems
Spearheaded research and testing for Kenya's first liquid rocket engine at Nakujaproject. Engineered a high-pressure liquid rocket engine test stand using a modified beer keg accumulator, custom mechatronic control software, and bespoke PCB architecture. Mentored and onboarded incoming propulsion teams on rigorous safety and operation protocols.
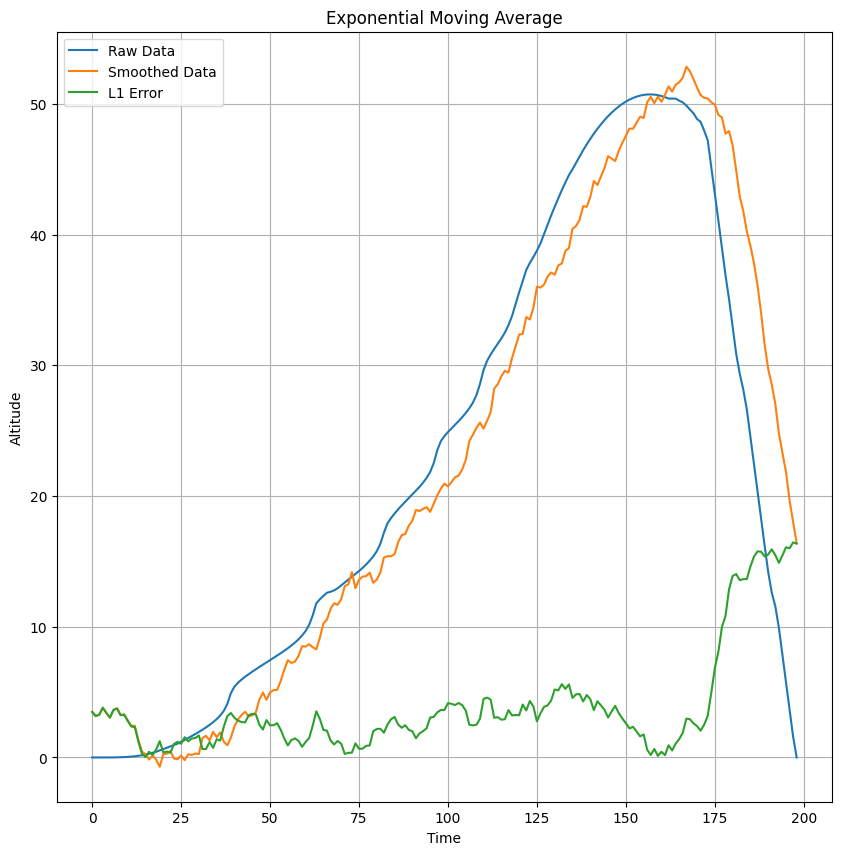
Apogee Detection Research
Published analysis on 'Utilizing Moving Average for Apogee Detection' in JKUAT SRI Conference 2023. Validated sensor fusion algorithms for telemetry data. The result was a functional ignition system with full control of the ignition sequence

Design and Fabrication of a Liquid Rocket Ignition System
For my University capstone project, I designed and fabricated an Augmented Spark Ignition (ASI) system. This involved engineering a miniature rocket engine producing 10N of thrust to ignite the main engine using a propane/oxygen mixture. The system achieved full scale-parity with the primary propulsion unit.
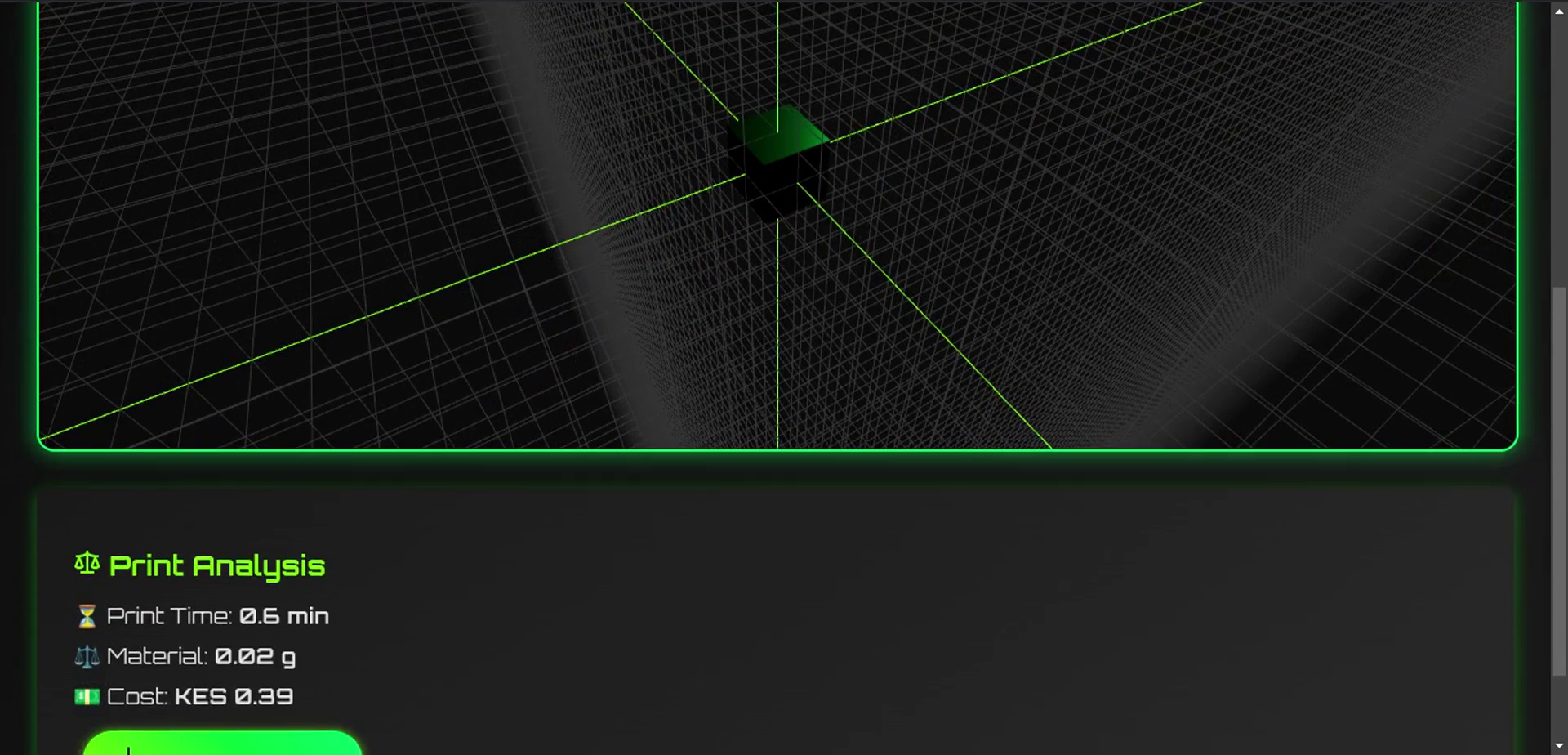
3D print Automatic Quotation Software
During my time at iForge innovators, I developed a cloud based serveless application that takes in amn STL file as input, processes it in a virtual docker environment, slices it for any printer configuration and automatically calculates the price incurred in producing the 3D part and displays the finished output to the user inclusive of all print parameters.
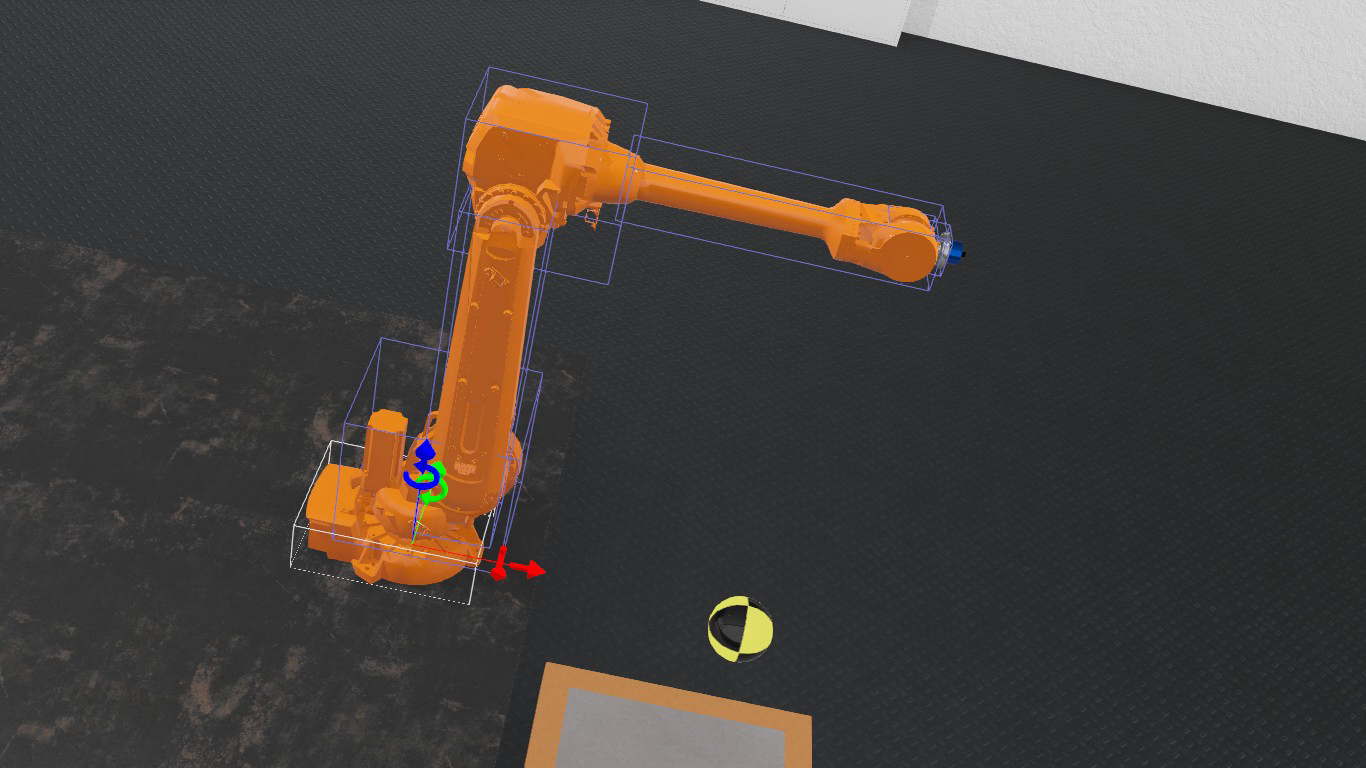
Autonomous 6DOF Robotic Platform
Designed a high-precision 6DOF robotic arm for motion control research. Integrated real-time data acquisition and kinematics modeling with ROS 2 and Gazebo simulations. Implemented reinforcement learning pipelines to adapt the platform for complex tasks such as object manipulation and autonomous navigation.

Design of a 3D printed gambrel for backcountry applications
Engineered a lightweight gambrel device for backcountry application to be used in the hoisting of game animals. The device was designed to be collapsible and portable, weighing less than 1kg and capable of holding up to 250kg load. to be fabricated purely using 3D rpinted without any metal components except for titanium pins at the joints.
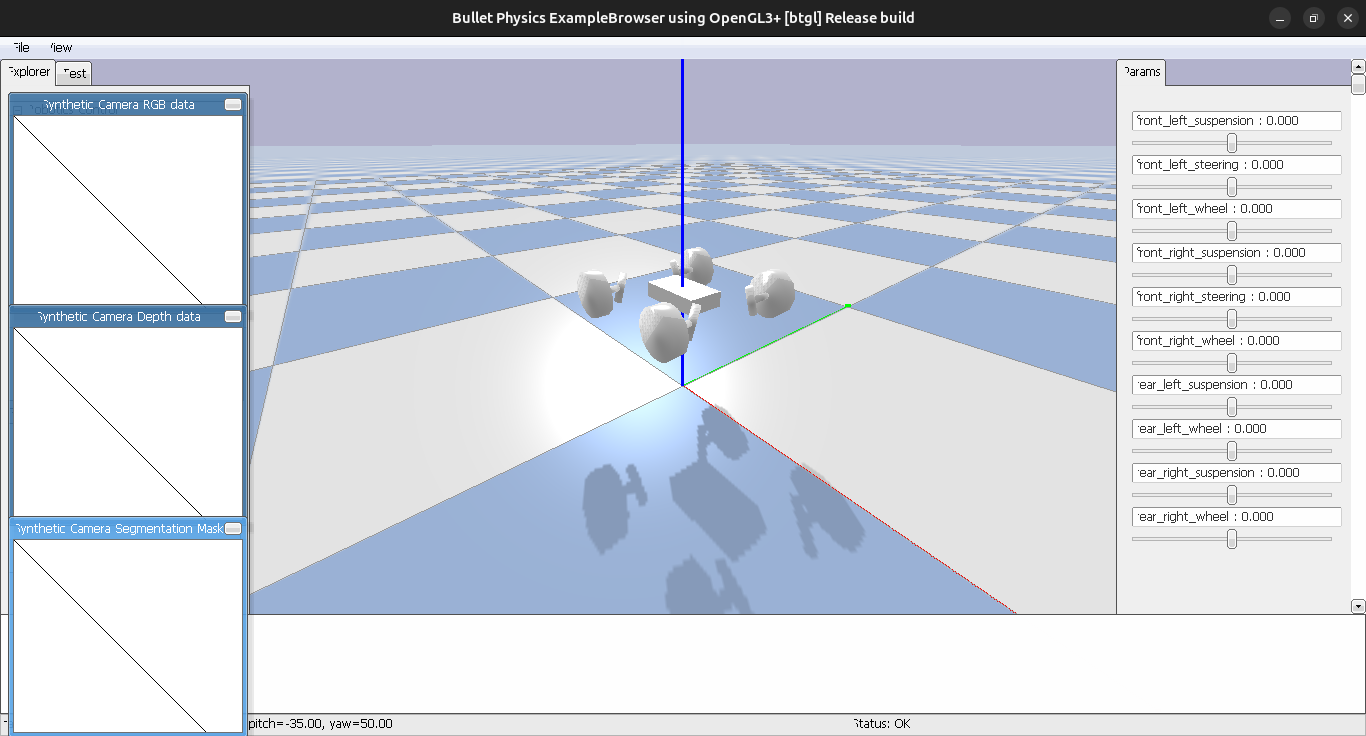
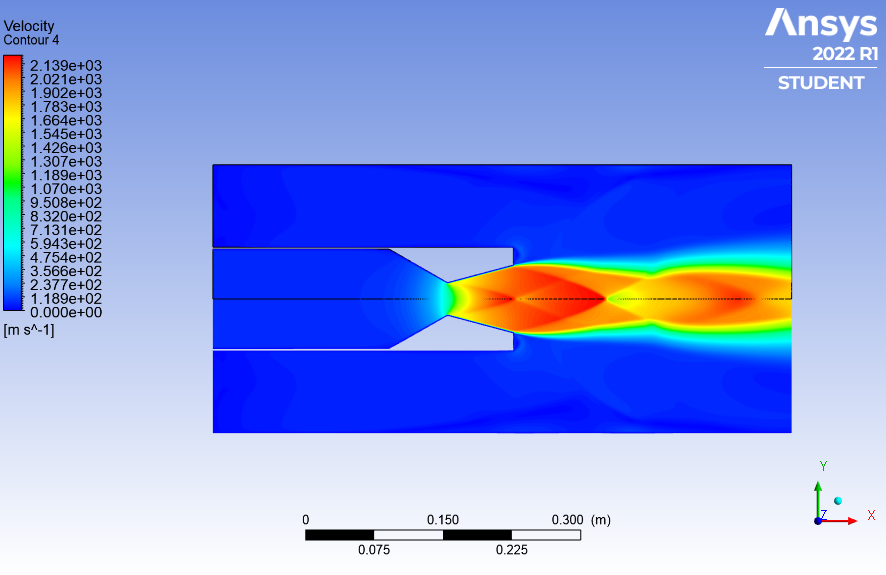
RC car design and simulation
Designed and simulated a high performance RC car for off-road applications. The car was designed to be lightweight and durable, capable of withstanding high impacts and rough terrain. The simulation was done using ROS 2 and Gazebo simlation environment, allowing control and reinforcement learning to adapt it to different tasks such as object identification, obstacle avoidance, cruise control and autonomous navigation.
STEM & Robotics Instructor
Empowering youth through STEM: Mentoring children and teenagers in robotics, mechatronics, and algorithm design. Orchestrating hands-on workshops using custom-built educational hardware and interactive learning modules to inspire the next generation of engineers.
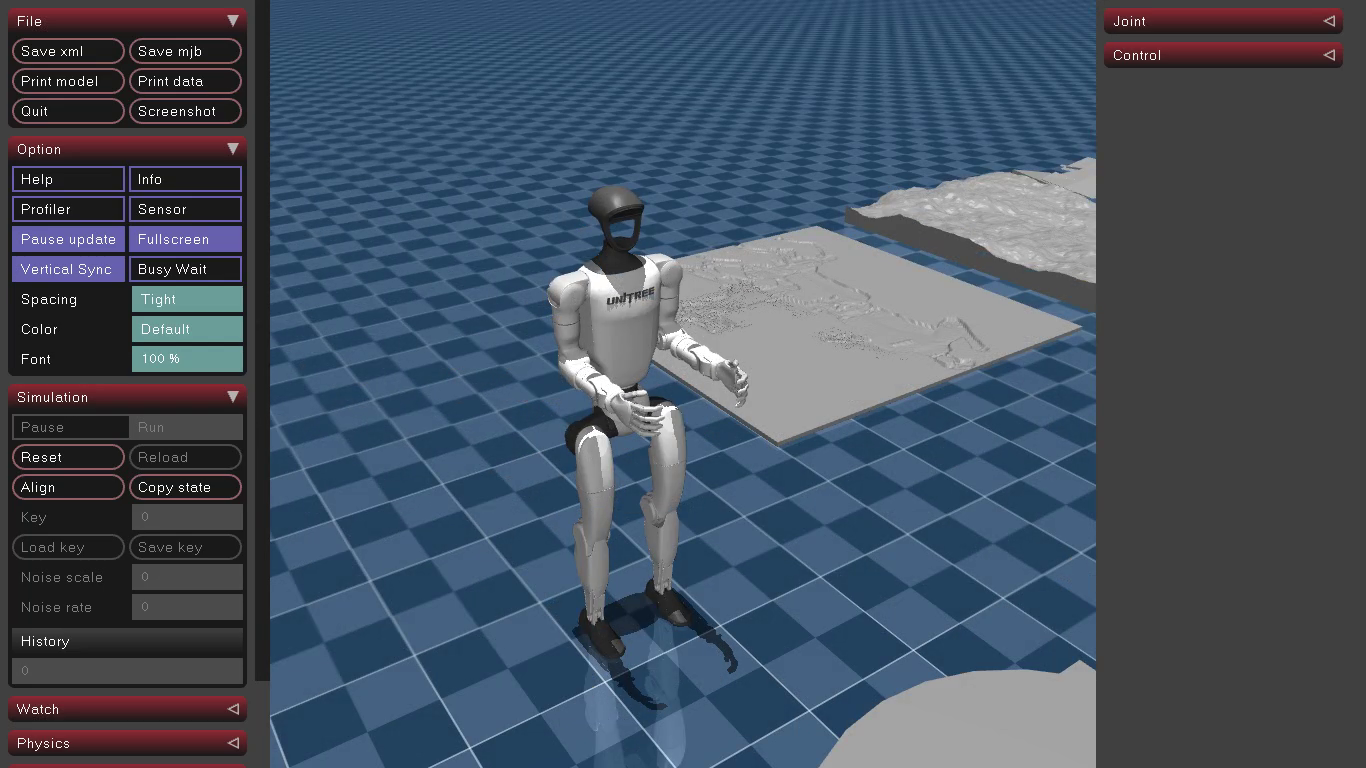
Humanoid Robotics RL Environment
Architected a virtual containerized environment for training humanoid robots using the Unitree SDK and MuJoCo. Integrated PyTorch for reinforcement learning, enabling complex gait and task mastery.
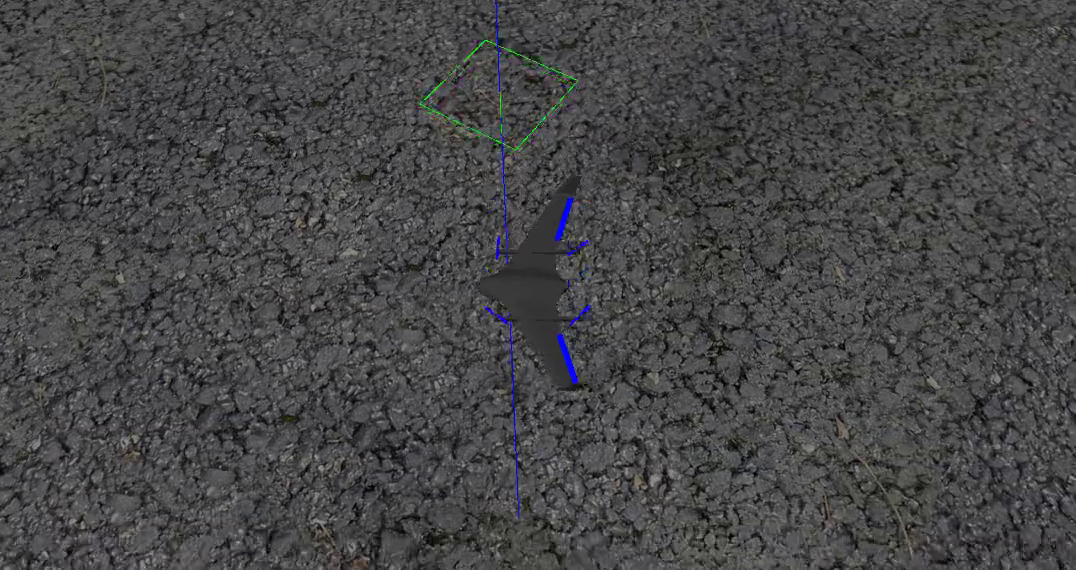
Autonomous UAV/UUV Swarm Simulation
Developed a robust training ecosystem for drones and underwater vehicles using PX4, Gazebo, and ROS 2. Features custom airframe integration, LIDAR control, and procedural task automation via reinforcement learning.